Hallo,
du musst wissen wie GPS Funktioniert. Die Position wird nicht errechnet sondern "geschätzt". Der Chip "schätzt" eine Position und gibt aus wie weit diese Position an der eigentlichen Position des Empfängers entfernt ist. Danach wird eine weitere Position errechnet die näher an der richtigen Position liegt usw. Das Verfahren nennt man Iteration. Die neue Position wird mit den neu empfangenen Daten + der letzten Position iteriert. Somit bestimmt der GPS Empfänger eigentlich immer Punkte die in der unmittelbaren Umgebung liegen. (Es werden keine Geschwidnigkeiten errechnet, nur Punkte) Wenn du z.B. deine Position ermittelst und plötzlich 250km weiter weg bist, dann hat der Chip ein großes Problem die Position zu messen und benötigt länger. Es kann sein, dass er seine Daten einfach löscht und die Position von 0 an bestimmt (Kaltstart).
Aber eine Geschwindigkeit von 250km/h sind absolut kein Problem für den Empfänger.
Du musst auch wissen, ein sog. Kaltstart dauert 30 Sek. (Das hängt mit der GPS-Signallänge zusammen)
Ein Warmstart (d.h. der GPS Empfänger kennt seine ungefähre Position und kann somit einfacher iterieren) dauert nur wenige Milli-Sekunden. Unmittelbahre nähe kann schonmal 10km weiter entfernt sein
")
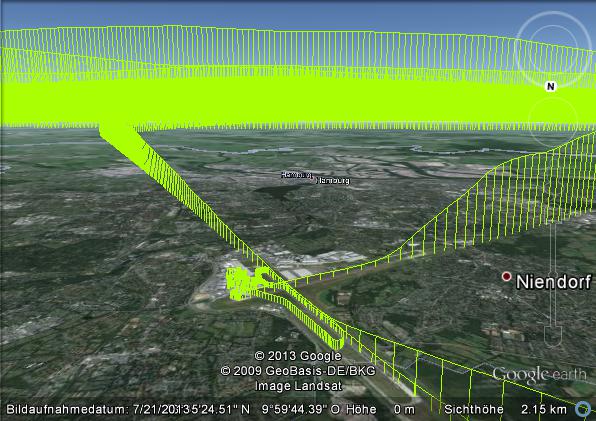
Aber ich vermute die Höhe wird ein Problem sein.
Höhenänderung -> Position geht verloren -> Neuberechnung -> Kaltstart
Vermutlich sind die Chipsätze sind so ausgelegt, dass die Position möglichst auf gleicher Höhe iteriert wird. Es kommt halt immer darauf an was du machen möchtest. Die GPS-Empfänger sind fürs Wandern oder Auto fahren ausgelegt, nicht fürs fliegen. Somit kann eine sprunghafte Höhenänderung sehr anfällig sein.
Wie gesagt, ich VERMUTE dass es daran liegt. Und ich weiß auch der i-Blue 747 A+ mit MTK II Chipsatz hat keine Probleme
")
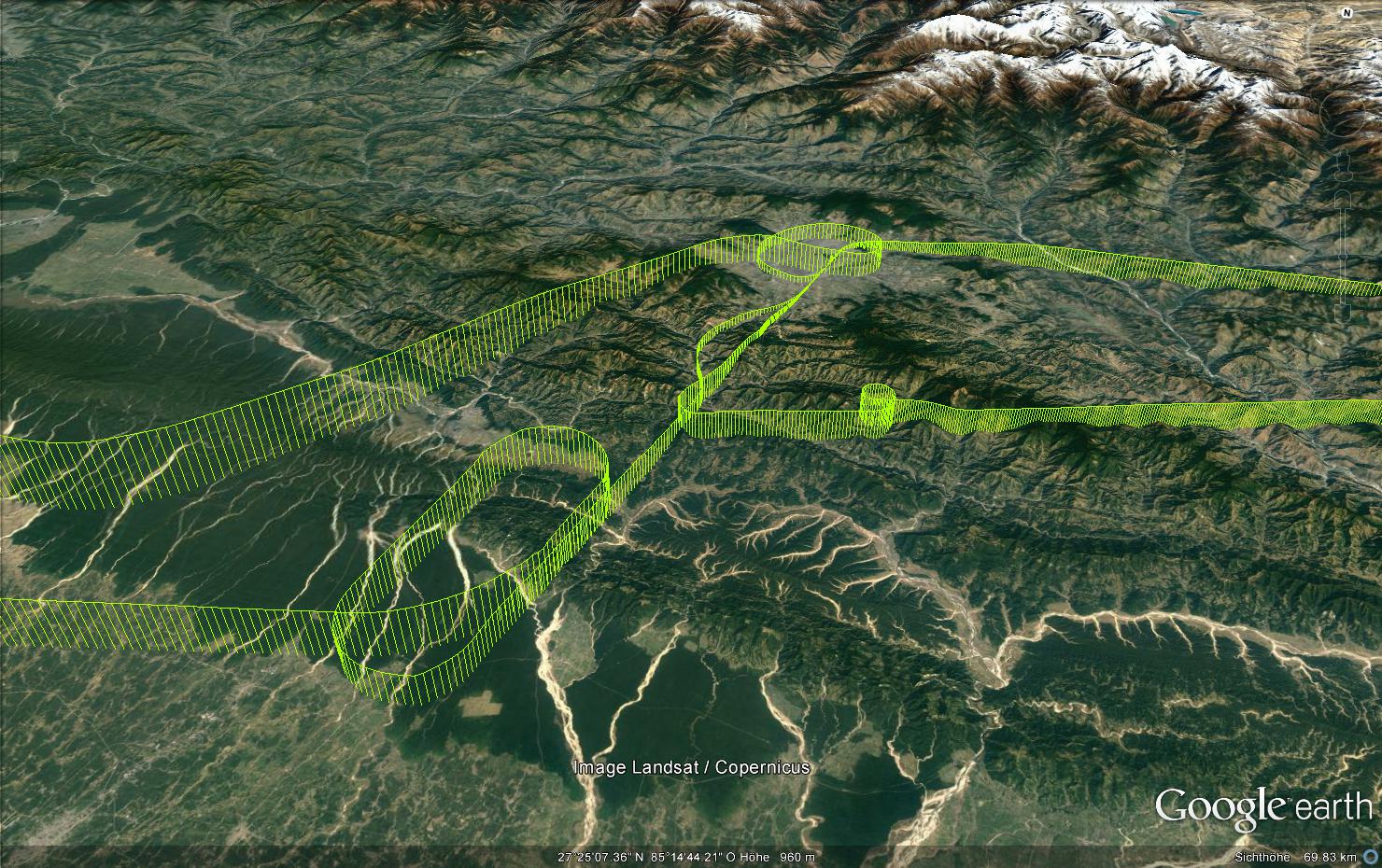
Angenommen die schnelle Höhenveränderung bekommt dem Lokalisations-Algorithmus nicht, weshalb schafft er dies dann im Reiseflug nicht wieder?
Ja, die Erde ist maximal 8000km "hoch" und ein Reiseflugzeug fliegt in 12km. Ich denke mit dieser Höhe wird der Chip einfach nicht klarkommen.
Ich habe mal im Labor mit einem GPS-Generator ein Spaceshuttle im Weltall simuliert (150 bis 300km Höhe). Dort hat der MTK II von meinem 747 A+ auch versagt und konnte keine Position ermitteln.

(Wie gesagt, er ist halt für die Erde ausgelegt, für den Weltraum oder dem Himmel gibt es andere GPS Empfänger)
LG Andreas